



无人机“人(rén)巡走山路”到“无人机人工操控”再到“无(wú)人机自动巡航”的三级跳,开启了电网巡检“智(zhì)慧(huì)巡线(xiàn)”新征程(chéng)。以(yǐ)往人工操作无人机,由于作业人员技能水平(píng)和(hé)判断(duàn)标(biāo)准(zhǔn)不同,巡视质量和结果会有误差,还存在一定的操作风险。采用(yòng)无人机自动驾(jià)驶巡检后,仅(jǐn)需一(yī)名监护人即可完成全(quán)部巡视作业,降低了人工成本和作业强度(dù),工作更(gèng)规(guī)范安全,巡(xún)视(shì)效(xiào)率大大提升。

电网全自动巡检系统有何优势?
1. 无(wú)人机化值守,减少人员用工、通勤成本。
2. 随时作业,减少安全事故。
3. 占(zhàn)地面积小,灵活部署。
4. 拍摄精准、效率高、缺陷报(bào)告一键导(dǎo)出。
5.全天候(hòu)作业:多(duō)旋翼无人(rén)机大多为电池(chí)供电,电(diàn)池续航限制了无人机的飞行距离、信号的强弱也限制(zhì)了无人机的通讯距离。无人机机库则(zé)能够对无人机进(jìn)行自动更换电,并进行联(lián)网(wǎng)控(kòng)制,实现(xiàn)无人机的全天候的自动化作业(yè)。
电网(wǎng)全自动巡检系统巡检(jiǎn)流程(chéng)介绍:
1. 数(shù)据采集:对(duì)作业区(qū)域进(jìn)行三维(wéi)数据采集建(jiàn)模。
2. 航线(xiàn)规划(huá):手动标(biāo)识飞(fēi)行航线。
3. 自(zì)动(dòng)飞行:对(duì)规划(huá)好的航线进行沿线自动飞行。
4. 自动拍(pāi)摄:边缘计算(suàn)识别、拍(pāi)摄点模型对(duì)比拍照(zhào)。
5. 巡(xún)检数(shù)据(jù)处理:图(tú)像(xiàng)智能数据处理。

全自动化无人机巡检系统部署在作(zuò)业区(qū)域(yù)内(nèi),在划(huá)定(dìng)好指定航线后,自动无(wú)人机系统即可完(wán)成无人(rén)机自动起降、图(tú)像采集、更换电池等(děng)作(zuò)业,让无人机实现电站“无(wú)人化”作业。
无(wú)人机自动化巡检系统建立的(de)第(dì)一步(bù)就是基于激光点云数据采集建立作业地区(qū)三(sān)维模型,制定满足于(yú)后期航线规划的精度要求。杆塔基础、杆塔设备、附属设施(shī)、通道、导地线均清晰可见,廊道覆(fù)盖宽度满(mǎn)足日(rì)常巡(xún)检航线规划需要(yào)。
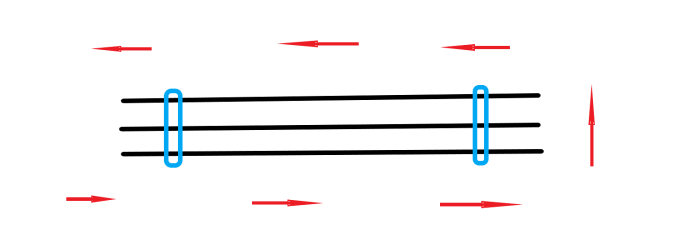
10kV-35kV(高塔设计除外)线路带宽要求在(zài)90-120米的点(diǎn)云采集适用高(gāo)低空来回(huí)飞行的采集方法。低(dī)空(kōng)飞行用于采集(jí)杆(gǎn)塔和导地线的点云(yún),高空飞行用(yòng)于采集通道带宽的(de)点云,并且同一杆段用同一(yī)架次进行高低空飞行采集,以减少出现(xiàn)重影(yǐng)的可能性。
该方法(fǎ)的(de)优点是(shì)简单(dān)快速(sù)容易撑握,缺点是杆塔过(guò)高(gāo)时通(tōng)道(dào)带宽的点云密度下降(jiàng)造成密度不够。
沿线路两侧(cè)扫一(yī)个来回的方式则解决了点云密度不高的问题。以1倍塔(tǎ)高为任务高度,飞行速度控(kòng)制在5米每秒匀速前进,太(tài)快会引起(qǐ)点云密度低导地(dì)线断断(duàn)续续,太慢或忽快(kuài)忽慢都容易(yì)发(fā)生(shēng)重影,沿(yán)线路(lù)的一侧前进另一侧(cè)返回,侧面偏移位置以线路的边线位于摇控器屏幕的九(jiǔ)宫格(gé)中间格的边(biān)缘(yuán)为参考。该(gāi)方法的(de)缺(quē)点(diǎn)是对(duì)飞手技能要(yào)求较(jiào)高,需(xū)要(yào)对任务(wù)高度、速度、匀(yún)速(sù)把控很好,否则容易产生(shēng)重(chóng)影。
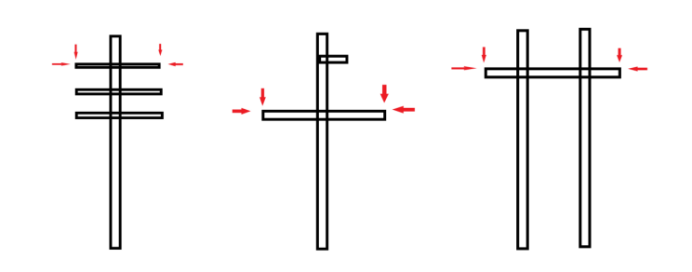
在专业飞手(shǒu)短缺的情况下,可采用沿线路中(zhōng)间扫一遍,再(zài)沿线路两边(biān)扫一个来回的方式进(jìn)行(háng)采集。它的优点是点云密度好,对飞(fēi)手技能要求不(bú)高,缺点(diǎn)是费时费电,效率不高。
控制点的采集数量要求(qiú)一般在精度允(yǔn)许的前提下配电线(xiàn)路按每3公里左右采集一基(jī)塔,输电线路按(àn)每8-13基塔(tǎ)采(cǎi)集(jí)一基,平原地(dì)区可相对增大区间(jiān),地形落差较大需要在落差杆塔小号端塔及(jí)大号端(duān)塔分别采集。一条线路(含支线(xiàn))不(bú)应少(shǎo)于3个控制点,少于3基(jī)杆塔的线路可1至2个(gè)控制点(diǎn),3至6基杆塔的(de)至(zhì)少要有2-3个控制点。
正三(sān)角(jiǎo)形排列单杆的控制(zhì)点拍摄以垂直拍摄(shè)点为杆(gǎn)顶的正中间(jiān)点,水平拍摄为杆顶(dǐng)的平面高度。

单(dān)杆双回杆塔、上(shàng)字形杆塔(含上字形单杆、上字形轻型塔、上字形自(zì)立塔)及无(wú)地线横担的门形双杆控(kòng)制(zhì)点拍摄横担导线挂点两(liǎng)端,垂直点分别处于(yú)导线挂点金具(jù)垂直外侧,水(shuǐ)平点分(fèn)别处于(yú)横(héng)担水平面(miàn)。
有(yǒu)地线横担的门(mén)形双杆控制点拍(pāi)摄地线横担挂点两端,垂直(zhí)点分别处(chù)于地线挂点(diǎn)金(jīn)具垂(chuí)直外侧,水平点(diǎn)分别处于横担水平(píng)面。

所有带双地(dì)线的自立塔控制点(diǎn)拍摄地(dì)线横担(dān)挂点两(liǎng)端,垂直点分(fèn)别处于地(dì)线挂点金具垂直外侧,水平点分别(bié)处(chù)于地线挂点金具垂直上(shàng)反方水平面。






